









Gökyüzündeki gözler: Yeni Nesil Dronlarda Yapay Zeka Güdümlü Görüş Sistemleri
Dronlar eğlence (TV şovu/film yapımı), hobi amaçlı fotoğrafçılık ve sadece eğlenceli bir oyuncak olarak yaygınlaşmıştır. Ulaşılması zor alanlara erişebilme kabiliyetleri nedeniyle denetim, lojistik/teslimat, güvenlik ve gözetim ile diğer endüstriyel kullanım alanlarında giderek daha fazla kullanılıyorlar. Ancak, bir drone'un çalışmasını sağlayan en kritik bileşenin görüş sistemi olduğunu biliyor muydunuz? Bu konunun derinlerine inmeden önce, dronların ne olduğunu, çeşitli uygulamalarını ve neden popülerliklerinin arttığını inceleyelim. Son olarak, nasıl çalıştığını tartışacağız. onsemi bu inanılmaz uçan nesnelere güç veren görüş sistemlerini dönüştürüyor.
Türler ve Uygulamalar
Dronlar, insansız hava sistemleri (UAS) olarak da adlandırılan insansız hava araçları (UAV) ve daha az ölçüde uzaktan kumandalı hava araçlarıdır (RPA). Sürülmeye ihtiyaç duymadan çalışabilir ve çeşitli sistemler kullanarak otonom olarak seyredebilirler.
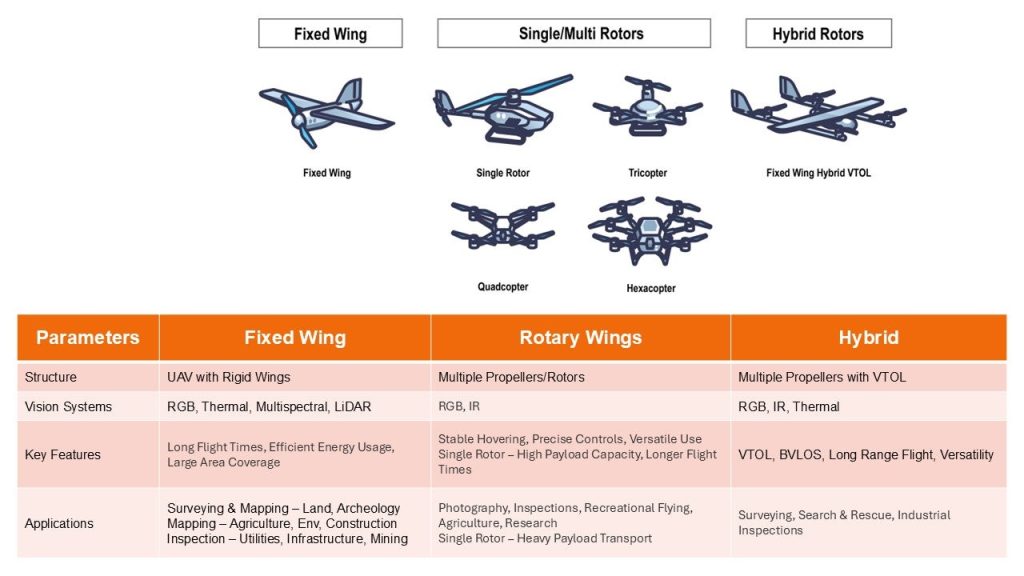
Üç tür drone vardır - Sabit Kanat, Tek Rotorlu/Çok Rotorlu ve Hibrit. Her biri farklı bir amaca hizmet eder ve her tür, inşa edildiği amaç ile uyumludur.
Sabit Kanatlar tipik olarak daha ağır yük taşıma, daha uzun uçuş süreleri ve istihbarat, gözetleme ve keşif (ISR) görevleri, muharebe operasyonları ve başıboş mühimmat, haritalama ve araştırma faaliyetlerinde kullanılır.
Tekli/Çoklu Rotorlar düzenli depolardan denetimlere ve hatta teslimat araçlarına kadar uzanan çok çeşitli endüstriyel odaklarla baskın kullanıma sahiptir. Bu tiplerin amacı, çok çeşitli kullanım durumlarında kullanılabildikleri ve son derece optimize edilmiş elektro-mekanik çözümler gerektirdikleri için çeşitlilik gösterebilir.
Hibrit Rotorlar Yukarıdaki her iki türün en iyilerini bir araya getirir ve özellikle alanın kısıtlı olduğu bölgelerde çok yönlü olmasını sağlayan dikey kalkış ve iniş (VTOL) yeteneğine sahiptir. Çoğu teslimat dronu, bariz nedenlerden dolayı bu yeteneklerden yararlanır.
Dronlarda Hareket ve Navigasyon Sistemleri
Dronlar hareket ve navigasyon için ivmeölçerler, jiroskoplar ve manyetometreler (topluca atalet ölçüm birimi veya IMU olarak adlandırılır), barometreler ve daha fazlası dahil olmak üzere çok sayıda sensör taşır. Optik akış (derinlik sensörleriyle desteklenen), eşzamanlı konum belirleme ve haritalama (SLAM) ve görsel odometri gibi çeşitli algoritmalar ve teknikler kullanırlar. Bu sensörler işlevlerini iyi bir şekilde yerine getirirken, uygun maliyetler ve optimum boyutlarda gerekli doğruluk ve hassasiyeti elde etmekte zorlanabilirler. Bu sorun uzun uçuş sürelerinde daha da ağırlaşarak pahalı bataryalara ihtiyaç duyulmasına veya batarya şarj döngülerine bağlı olarak uçuş sürelerinin sınırlandırılmasına yol açmaktadır.
Dronlarda Görüş Sistemleri
Görüntü sensörleri yukarıdaki sensörleri önemli operasyonel geliştirmelerle tamamlayarak yüksek hassasiyetli, yüksek doğruluklu bir makine ortaya çıkarır. Bunlar iki yapıda mevcuttur - Gimballer (genellikle faydalı yük olarak da adlandırılır) ve Görsel Navigasyon Sistemleri (VNS).
Gimballer* - birinci şahıs görüşü (FPV) sağlar; genellikle geniş elektromanyetik spektruma yayılan farklı görüntü sensörü türlerinden oluşurlar (istisnai durumlarda ultraviyole, 300nm - 1000nm üzerindeki normal CMOS görüntü sensörleri, 2000nm'ye kadar uzanan kısa dalga kızılötesi (SWIR) sensörler ve 2000nm'nin ötesinde orta dalga (MWIR) ve uzun dalga kızılötesi (LWIR) sensörler.
Görsel Navigasyon Sistemleri (VNS) - Navigasyon rehberliği, nesne ve çarpışmadan kaçınma sağlarlar; genellikle ucuz düşük çözünürlüklü görüntü sensörlerinden oluşurlar ve IMU ve sensör verileriyle birlikte, otonom navigasyon için kapsamlı bir çözüm oluşturmak üzere bilgisayarla görme tekniklerini kullanırlar.
Görüş Sistemlerinin Önemi
Dronlar, daha önce açıklanan kullanım ve uygulamalarda görüldüğü gibi hem iç hem de dış mekan koşullarında çalışır. Bu koşullar, toz, sis, duman ve zifiri karanlık ortamlarda çok çeşitli aydınlatma farklılıkları ve görünürlük sınırlamaları ile önemli ölçüde zorlayıcı olabilir. Bu sistemler, görüntü verileri üzerinde uygulanan önemli yapay zeka (AI) ve makine öğrenimi (ML) algoritmalarından yararlanmaya çalışırken, daha önce bahsedilen teknikler tarafından sağlanan verilerin yardımını kullanarak, düşük güç tüketen ve uzun menzilli mesafe veya uzun uçuş süresi operasyonları sunan son derece optimize edilmiş bir aracı çalıştırma bağlamında.
Bu algoritmalara veri girişinin yüksek doğrulukta ve son derece ayrıntılı olması, ancak belirli kullanım durumlarında sadece ihtiyaç duyulanı sunması ve böylece verimli işlemeyi mümkün kılması zorunludur. AI/ML kullanımında eğitim sürelerinin kısa olması ve çıkarımın yüksek doğruluk ve hassasiyetle hızlı olması gerekir. Yukarıdaki gereksinimleri karşılamak için drone hangi ortamda çalışırsa çalışsın görüntülerin yüksek kalitede olması gerekir.
Sadece sahneyi yakalayan ve işleme için sunan sensörler, bu makinelerin yüksek kalitede çalışmasını sağlamada önemli ölçüde yetersiz kalmaktadır ve çoğu durumda konuşlandırılma amaçlarını geçersiz kılacaktır. İlgilenilen bölgelerde tam ayrıntılara sahip olmaya devam ederken ölçek küçültme, aynı karede parlak ve karanlık aydınlatma koşullarını ele almak için geniş dinamik aralık sunma, görüntülerdeki parazit etkileri en aza indirme / ortadan kaldırma, toz / sis / duman dolu görüş alanlarını ele alma ve bu görüntülere yüksek derinlik çözünürlüğü ile yardımcı olma yeteneği, İHA'ları son derece optimize edilmiş bir makine haline getirmek için muazzam faydalar sağlar.
Bu yetenekler, bu görüntülerin yeniden yapılandırılması ve analizi için gereken kaynakların (işlem çekirdekleri, GPU'lar, çip içi veya dışı bellek, veri yolu mimarileri ve güç yönetimi) büyüklüğünü en aza indirir ve karar verme sürecini hızlandırır. Bu aynı zamanda, özellikle de günümüz İHA'larının 10'dan fazla görüntü sensörüne kolayca ev sahipliği yapabildiğini düşündüğümüzde, genel sistemin ürün maliyetini de düşürmektedir. Alternatif olarak, aynı kaynak seti için, etkili karar vermeye yardımcı olacak daha fazla analiz ve karmaşık algoritmalar mümkün kılınabilir ve böylece İHA'yı bu kalabalık alanda farklılaştırabilir.