









Mắt trên trời: Hệ thống thị giác do trí tuệ nhân tạo (AI) điều khiển trên các máy bay không người lái thế hệ mới
Máy bay không người lái (drone) đã trở nên phổ biến trong lĩnh vực giải trí (sản xuất phim/chương trình truyền hình), nhiếp ảnh nghiệp dư và thậm chí là một món đồ chơi thú vị. Chúng ngày càng được sử dụng rộng rãi trong các lĩnh vực như kiểm tra, logistics/vận chuyển, an ninh và giám sát, cũng như các ứng dụng công nghiệp khác, nhờ khả năng tiếp cận các khu vực khó tiếp cận. Tuy nhiên, bạn có biết rằng thành phần quan trọng nhất giúp drone hoạt động chính là hệ thống thị giác của nó? Trước khi đi sâu vào chủ đề này, hãy cùng tìm hiểu về máy bay không người lái, các ứng dụng đa dạng của chúng và lý do tại sao chúng trở nên phổ biến. Cuối cùng, chúng ta sẽ thảo luận về cách... onsemi Đang cách mạng hóa các hệ thống thị giác điều khiển những vật thể bay tuyệt vời này.
Các loại & Ứng dụng
Máy bay không người lái (UAV) là các phương tiện bay không người lái, còn được gọi là hệ thống bay không người lái (UAS), và trong một số trường hợp ít phổ biến hơn là máy bay điều khiển từ xa (RPA). Chúng có thể hoạt động mà không cần người lái và tự động điều hướng bằng cách sử dụng nhiều hệ thống khác nhau.
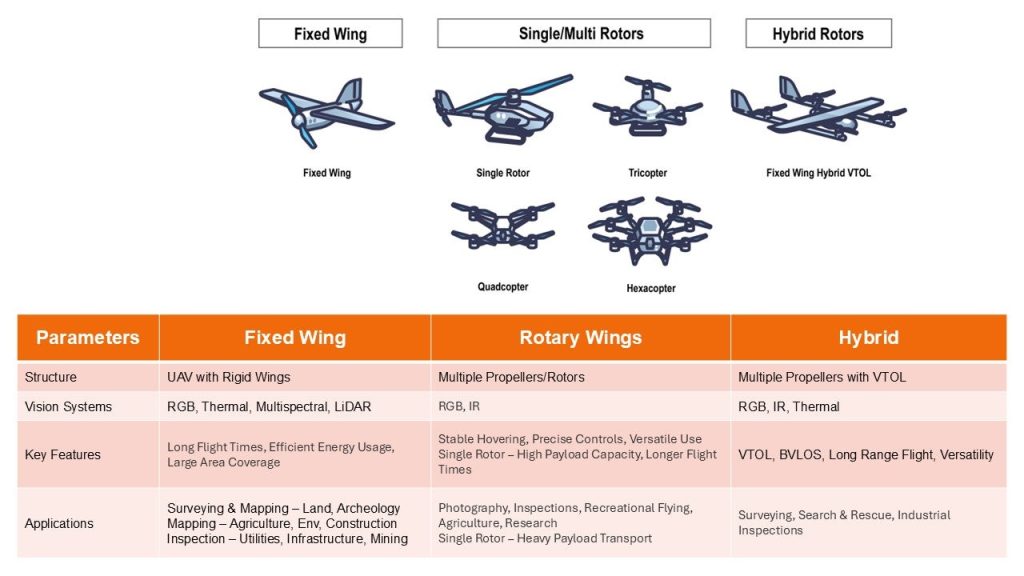
Có ba loại máy bay không người lái – Cánh cố định, Cánh quạt đơn/Cánh quạt đa và Hybrid. Mỗi loại phục vụ một mục đích khác nhau, và mỗi loại được thiết kế phù hợp với mục đích sử dụng cụ thể mà nó được tạo ra.
Cánh cố định Thường được sử dụng cho việc vận chuyển tải trọng nặng, thời gian bay dài và được triển khai trong các nhiệm vụ tình báo, giám sát và trinh sát (ISR), hoạt động chiến đấu, vũ khí tự hành, lập bản đồ và các hoạt động nghiên cứu, v.v.
Máy bay một cánh quạt/Nhiều cánh quạt Có ứng dụng chủ đạo, với đa dạng lĩnh vực công nghiệp từ kho bãi thông thường, kiểm tra đến thậm chí là phương tiện vận chuyển. Mục đích của các loại này có thể đa dạng do chúng có thể được triển khai trong nhiều trường hợp sử dụng khác nhau và đòi hỏi các giải pháp điện-cơ khí được tối ưu hóa cao.
Rotor lai Kết hợp những ưu điểm tốt nhất của cả hai loại trên, và có khả năng cất cánh và hạ cánh thẳng đứng (VTOL), giúp nó trở nên linh hoạt, đặc biệt trong các khu vực có không gian hạn chế. Hầu hết các drone giao hàng đều tận dụng những khả năng này vì những lý do rõ ràng.
Hệ thống điều khiển chuyển động và định vị trong máy bay không người lái
Máy bay không người lái được trang bị nhiều loại cảm biến cho chuyển động và định vị, bao gồm gia tốc kế, con quay hồi chuyển và cảm biến từ (được gọi chung là đơn vị đo lường quán tính, hay IMU), cảm biến áp suất và nhiều loại khác. Chúng sử dụng nhiều thuật toán và kỹ thuật như dòng quang học (được hỗ trợ bởi cảm biến độ sâu), định vị và lập bản đồ đồng thời (SLAM) và đo khoảng cách bằng hình ảnh. Mặc dù các cảm biến này hoạt động hiệu quả, chúng có thể gặp khó khăn trong việc đạt được độ chính xác và độ chính xác cần thiết với chi phí hợp lý và kích thước tối ưu. Vấn đề này trở nên nghiêm trọng hơn trong các chuyến bay kéo dài, dẫn đến việc phải sử dụng pin đắt tiền hoặc giới hạn thời gian bay dựa trên chu kỳ sạc pin.
Hệ thống thị giác trên máy bay không người lái
Cảm biến hình ảnh bổ sung cho các cảm biến trên với những cải tiến đáng kể về mặt vận hành, mang lại một hệ thống máy móc có độ chính xác và độ chính xác cao. Các cảm biến này có hai loại chính – Gimbals (thường được gọi là tải trọng) và Hệ thống Điều hướng Hình ảnh (VNS).
Gimbal* – Cung cấp chế độ xem người thứ nhất (FPV); chúng thường bao gồm các loại cảm biến hình ảnh khác nhau trải rộng trên phổ điện từ rộng (tia cực tím trong một số trường hợp đặc biệt, cảm biến hình ảnh CMOS thông thường từ 300nm đến 1000nm, cảm biến hồng ngoại sóng ngắn (SWIR) kéo dài đến 2000nm và vượt quá 2000nm với cảm biến hồng ngoại sóng trung bình (MWIR) và cảm biến hồng ngoại sóng dài (LWIR).
Hệ thống định vị Vision (VNS) – Cung cấp hướng dẫn điều hướng, tránh vật cản và va chạm; chúng thường được cấu thành từ các cảm biến hình ảnh độ phân giải thấp giá rẻ và kết hợp với dữ liệu từ IMU và các cảm biến khác, sử dụng các kỹ thuật thị giác máy tính để tạo ra một giải pháp toàn diện cho điều hướng tự động.
Tầm quan trọng của Hệ thống Nhận diện Hình ảnh
Máy bay không người lái hoạt động cả trong điều kiện trong nhà và ngoài trời, như đã mô tả trong các ứng dụng và trường hợp sử dụng trước đó. Các điều kiện này có thể gặp nhiều thách thức do sự biến đổi lớn về ánh sáng và hạn chế về tầm nhìn trong các môi trường bụi, sương mù, khói và bóng tối hoàn toàn. Các hệ thống này cố gắng tận dụng các thuật toán trí tuệ nhân tạo (AI) và học máy (ML) được áp dụng trên dữ liệu hình ảnh, đồng thời sử dụng dữ liệu được cung cấp bởi các kỹ thuật đã đề cập trước đó, tất cả trong bối cảnh vận hành một phương tiện được tối ưu hóa cao, tiêu thụ ít năng lượng và có khả năng hoạt động ở khoảng cách xa hoặc thời gian bay kéo dài.
Điều quan trọng là dữ liệu đầu vào cho các thuật toán này phải có độ chính xác cao và chi tiết, tuy nhiên trong một số trường hợp sử dụng cụ thể, chỉ cần cung cấp chính xác những gì cần thiết để đảm bảo xử lý hiệu quả. Thời gian đào tạo trong ứng dụng AI/ML cần được rút ngắn, và quá trình suy luận cần diễn ra nhanh chóng với độ chính xác và độ chính xác cao. Hình ảnh cần có chất lượng cao bất kể môi trường hoạt động của drone để đáp ứng các yêu cầu trên.
Các cảm biến chỉ ghi lại cảnh và truyền dữ liệu để xử lý không thể đáp ứng được yêu cầu hoạt động chất lượng cao của các máy móc này, trong hầu hết các trường hợp sẽ làm mất đi mục đích chính của việc triển khai chúng. Khả năng thu nhỏ kích thước mà vẫn giữ được chi tiết đầy đủ trong các vùng quan tâm, cung cấp dải động rộng để xử lý điều kiện ánh sáng sáng và tối trong cùng một khung hình, giảm thiểu/loại bỏ các hiệu ứng phụ trong hình ảnh, xử lý các trường nhìn bị bụi/sương mù/khói và hỗ trợ các hình ảnh này với độ phân giải độ sâu cao mang lại lợi ích to lớn trong việc tối ưu hóa UAV thành một máy móc hiệu quả cao.
Các khả năng này giúp giảm thiểu lượng tài nguyên cần thiết – bao gồm lõi xử lý, GPU, bộ nhớ trên chip hoặc ngoài chip, kiến trúc bus và quản lý năng lượng – trong quá trình tái tạo và phân tích hình ảnh, đồng thời đẩy nhanh quá trình ra quyết định. Điều này cũng giúp giảm chi phí vật liệu (BOM) của hệ thống tổng thể, đặc biệt khi xem xét rằng các UAV hiện nay có thể dễ dàng trang bị hơn 10 cảm biến hình ảnh. Ngoài ra, với cùng một bộ tài nguyên, việc thực hiện phân tích và các thuật toán phức tạp hơn để hỗ trợ ra quyết định hiệu quả có thể được thực hiện, từ đó giúp UAV nổi bật trong lĩnh vực cạnh tranh khốc liệt này.