









Mata di langit: Sistem Penglihatan Berbasis AI pada Drone Generasi Berikutnya
Drone telah merambah ke dunia hiburan (acara TV/pembuatan film), fotografi penggemar dan hanya sebagai mainan yang menyenangkan. Drone semakin banyak digunakan dalam inspeksi, logistik/pengiriman, keamanan dan pengawasan, dan kasus penggunaan industri lainnya, karena kemampuannya untuk mengakses area yang sulit dijangkau. Namun, tahukah Anda bahwa komponen paling penting yang memungkinkan pengoperasian drone adalah sistem penglihatannya? Sebelum membahas topik ini lebih dalam, mari kita telusuri apa itu drone, beragam aplikasinya, dan mengapa drone melonjak popularitasnya. Terakhir, kita akan membahas bagaimana onsemi mengubah sistem penglihatan yang memberi daya pada objek terbang yang luar biasa ini.
Jenis & Aplikasi
Drone adalah kendaraan udara tak berawak (UAV), juga disebut sistem udara tak berawak (UAS), dan pada tingkat yang lebih rendah adalah pesawat yang dikemudikan dari jarak jauh (RPA). Drone dapat beroperasi tanpa perlu dikemudikan dan menavigasi secara otonom dengan menggunakan berbagai sistem.
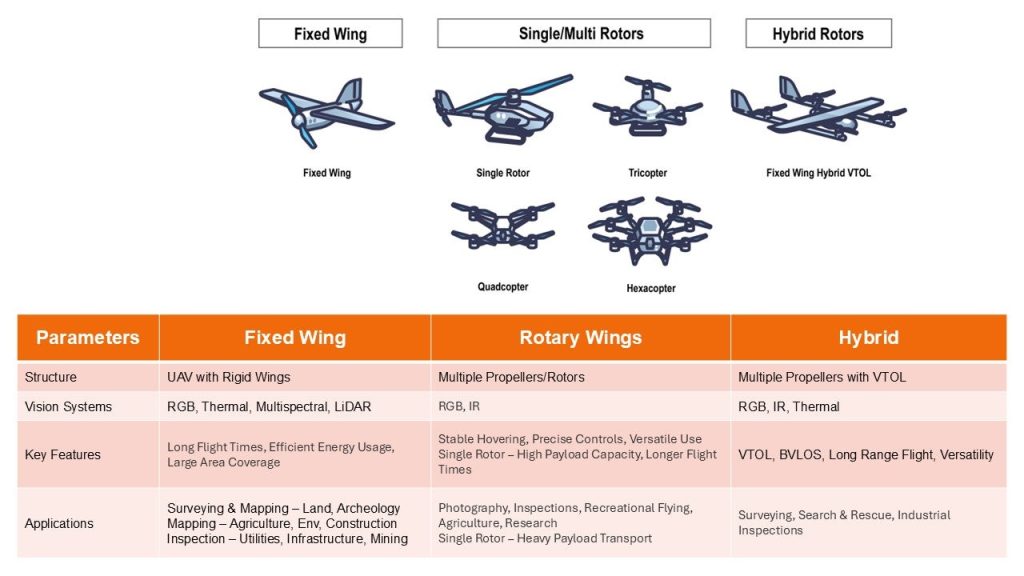
Ada tiga jenis drone - Sayap Tetap, Rotor Tunggal/Multi Rotor dan Hibrida. Masing-masing memiliki tujuan yang berbeda, dan setiap jenis diselaraskan dengan tujuan pembuatannya.
Sayap Tetap biasanya digunakan untuk pengangkutan muatan yang lebih berat, waktu penerbangan yang lebih lama dan digunakan dalam misi intelijen, pengawasan dan pengintaian (ISR), operasi tempur dan amunisi yang berkeliaran, pemetaan dan kegiatan penelitian untuk menyebutkan beberapa di antaranya.
Single- / Multi-Rotor memiliki penggunaan yang dominan, dengan berbagai macam fokus industri yang berkisar dari gudang biasa hingga inspeksi dan bahkan sebagai kendaraan pengiriman. Tujuan dari jenis ini dapat bervariasi karena dapat digunakan dalam berbagai macam kasus penggunaan, dan menuntut solusi elektro-mekanis yang sangat optimal.
Rotor Hibrida menggabungkan yang terbaik dari kedua jenis di atas, dan memiliki kemampuan lepas landas dan mendarat secara vertikal (VTOL) yang membuatnya serbaguna, khususnya di wilayah yang terbatas ruang. Sebagian besar drone pengiriman memanfaatkan kemampuan ini karena alasan yang jelas.
Sistem Gerak & Navigasi pada Drone
Drone membawa banyak sensor untuk gerak dan navigasi, termasuk akselerometer, giroskop, dan magnetometer (secara kolektif disebut sebagai unit pengukuran inersia, atau IMU), barometer, dan banyak lagi. Sensor-sensor ini menggunakan berbagai algoritme dan teknik seperti aliran optik (dibantu dengan sensor kedalaman), pelokalan dan pemetaan simultan (SLAM), dan odometri visual. Meskipun sensor-sensor ini menjalankan fungsinya dengan baik, namun sensor-sensor ini kesulitan untuk mencapai akurasi dan presisi yang dibutuhkan dengan biaya yang terjangkau dan ukuran yang optimal. Masalah ini semakin diperparah selama waktu penerbangan yang lebih lama, yang mengarah pada kebutuhan akan baterai yang mahal atau membatasi waktu penerbangan berdasarkan siklus pengisian daya baterai.
Sistem Penglihatan dalam Drone
Sensor gambar melengkapi sensor di atas dengan peningkatan operasional yang signifikan sehingga menghasilkan mesin dengan akurasi tinggi dan presisi tinggi. Sensor ini tersedia dalam dua entitas - Gimbal (sering juga disebut sebagai muatan) dan Vision Navigation Systems (VNS).
Gimbal * - menyediakan tampilan orang pertama (FPV); mereka umumnya merupakan berbagai jenis sensor gambar yang mencakup spektrum elektromagnetik yang luas (ultraviolet dalam kasus-kasus luar biasa, sensor gambar CMOS biasa di atas 300nm - 1000nm, sensor infra-merah gelombang pendek (SWIR) yang membentang hingga 2000nm dan di luar 2000nm dengan sensor infra-merah gelombang menengah (MWIR) dan infra-merah gelombang panjang (LWIR).
Sistem Navigasi Visi (VNS) - memberikan panduan navigasi, penghindaran objek dan tabrakan; umumnya terdiri dari sensor gambar beresolusi rendah yang murah dan bersama dengan IMU dan data sensor, menggunakan teknik visi komputer untuk menciptakan solusi komprehensif untuk navigasi otonom.
Pentingnya Sistem Visi
Drone beroperasi baik dalam kondisi di dalam maupun di luar ruangan seperti yang terlihat dalam penggunaan dan aplikasi yang dijelaskan sebelumnya. Kondisi ini dapat menjadi tantangan yang signifikan dengan variasi pencahayaan yang luas dan keterbatasan jarak pandang di lingkungan yang berdebu, berkabut, berasap, dan gelap gulita. Sistem ini berusaha memanfaatkan algoritma kecerdasan buatan (AI) dan pembelajaran mesin (ML) yang signifikan yang diterapkan pada data gambar sambil menggunakan bantuan data yang disediakan oleh teknik yang disebutkan sebelumnya, semuanya dalam konteks pengoperasian kendaraan yang sangat dioptimalkan yang mengkonsumsi daya rendah dan memberikan jarak jauh atau operasi waktu penerbangan yang lama.
Input data ke dalam algoritme ini harus memiliki ketepatan tinggi dan sangat rinci, namun dalam kasus penggunaan tertentu, memberikan apa yang dibutuhkan sehingga memungkinkan pemrosesan yang efisien. Waktu pelatihan dalam penggunaan AI/ML harus singkat, dan pengambilan kesimpulan harus cepat dengan akurasi dan presisi yang tinggi. Gambar harus berkualitas tinggi, apa pun lingkungan tempat drone beroperasi untuk memenuhi persyaratan di atas.
Sensor yang hanya menangkap pemandangan dan menyajikannya untuk diproses, sangat kurang dalam memungkinkan pengoperasian berkualitas tinggi dari mesin ini, yang dalam banyak kasus, akan membatalkan tujuan penerapannya. Kemampuan untuk memperkecil skala namun tetap memiliki detail penuh di area yang diminati, memberikan rentang dinamis yang luas untuk mengatasi kondisi pencahayaan yang terang dan gelap dalam bingkai yang sama, meminimalkan/menghilangkan efek parasit pada gambar, mengatasi debu/kabut/asap yang memenuhi bidang pandang dan membantu gambar-gambar ini dengan resolusi kedalaman yang tinggi memberikan manfaat yang luar biasa untuk menjadikan UAV sebagai mesin yang sangat dioptimalkan.
Kemampuan ini meminimalkan besarnya sumber daya - inti pemrosesan, GPU, memori di dalam atau di luar chip, arsitektur bus, dan manajemen daya - yang diperlukan dalam merekonstruksi dan menganalisis gambar-gambar ini dan mempercepat proses pengambilan keputusan. Hal ini juga mengurangi biaya BOM dari keseluruhan sistem, terutama jika kita mempertimbangkan UAV saat ini dengan mudah dapat menampung lebih dari 10 sensor gambar. Sebagai alternatif, untuk kumpulan sumber daya yang sama, lebih banyak analisis dan algoritme kompleks untuk membantu pengambilan keputusan yang efektif dapat dilakukan sehingga membuat UAV berbeda di bidang yang ramai ini.