









عيون في السماء: أنظمة الرؤية المعتمدة على الذكاء الاصطناعي في الجيل القادم من الطائرات بدون طيار
لقد أصبحت الطائرات بدون طيار منتشرة في مجال الترفيه (صناعة البرامج التلفزيونية/الأفلام)، والتصوير الفوتوغرافي للهواة وكألعاب ممتعة. ويتزايد استخدامها في التفتيش والخدمات اللوجستية/التسليم والأمن والمراقبة وغيرها من حالات الاستخدام الصناعي، نظراً لقدرتها على الوصول إلى المناطق التي يصعب الوصول إليها. ومع ذلك، هل تعلم أن العنصر الأكثر أهمية في تمكين تشغيل الطائرة بدون طيار هو نظام الرؤية الخاص بها؟ قبل التعمق أكثر في هذا الموضوع، دعنا نستكشف ماهية الطائرات بدون طيار، وتطبيقاتها المتنوعة، وسبب زيادة شعبيتها. وأخيراً، سنناقش كيف أونسمي تعمل على تحويل أنظمة الرؤية التي تشغل هذه الأجسام الطائرة المذهلة.
الأنواع والتطبيقات
الطائرات بدون طيار هي مركبات جوية غير مأهولة (UAV)، وتسمى أيضاً الأنظمة الجوية غير المأهولة (UAS)، وبدرجة أقل الطائرات الموجهة عن بُعد (RPA). ويمكنها العمل دون الحاجة إلى القيادة والتنقل بشكل مستقل باستخدام مجموعة متنوعة من الأنظمة.
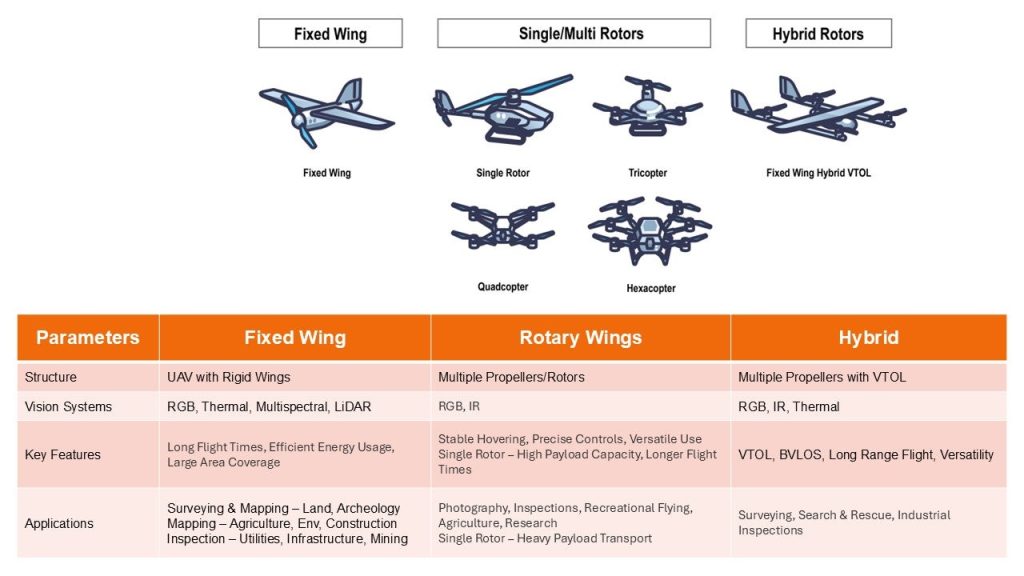
هناك ثلاثة أنواع من الطائرات بدون طيار - الطائرات ذات الأجنحة الثابتة والطائرات ذات الدوارة الواحدة/المتعددة الدوارات والطائرات الهجينة. يخدم كل منها غرضاً مختلفاً، ويتماشى كل نوع مع الغرض المقصود الذي صُممت من أجله.
الأجنحة الثابتة تُستخدم عادةً لنقل حمولات أثقل وزناً، وأوقات تحليق أطول، ويتم نشرها في مهام الاستخبارات والمراقبة والاستطلاع (ISR)، والعمليات القتالية والذخائر المتسكعة ورسم الخرائط والأنشطة البحثية على سبيل المثال لا الحصر.
دوّارات أحادية/متعددة الدوّارات لها الاستخدام السائد، مع مجموعة واسعة من التركيزات الصناعية التي تتراوح من المستودعات العادية إلى عمليات التفتيش وحتى كمركبات توصيل. يمكن أن يتنوع الغرض من هذه الأنواع حيث يمكن نشرها في مجموعة واسعة من حالات الاستخدام، وتتطلب حلولاً كهروميكانيكية كهربائية محسنة للغاية.
الدوّارات الهجينة تدمج أفضل ما في كلا النوعين أعلاه، وتتمتع بقدرة الإقلاع والهبوط العمودي (VTOL) التي تجعلها متعددة الاستخدامات، خاصة في المناطق ذات المساحة المحدودة. تستفيد معظم طائرات التوصيل بدون طيار من هذه القدرات لأسباب واضحة.
أنظمة الحركة والملاحة في الطائرات بدون طيار
تحمل الطائرات بدون طيار العديد من أجهزة الاستشعار للحركة والملاحة، بما في ذلك مقاييس التسارع والجيروسكوبات ومقاييس المغناطيسية (يشار إليها مجتمعةً بوحدة قياس القصور الذاتي أو IMU) ومقاييس الضغط الجوي وغيرها. وهي تستخدم مجموعة متنوعة من الخوارزميات والتقنيات مثل التدفق البصري (بمساعدة مستشعرات العمق)، والتوطين المتزامن ورسم الخرائط (SLAM) وقياس المسافات البصري. وعلى الرغم من أن هذه المستشعرات تؤدي وظائفها بشكل جيد، إلا أنها قد تواجه صعوبة في تحقيق الدقة والدقة المطلوبة بتكاليف معقولة وأحجام مثالية. وتتفاقم المشكلة أكثر خلال أوقات الطيران الطويلة، مما يؤدي إلى الحاجة إلى بطاريات باهظة الثمن أو الحد من أوقات الطيران بناءً على دورات شحن البطارية.
أنظمة الرؤية في الطائرات بدون طيار
تكمّل مستشعرات الصور أجهزة الاستشعار المذكورة أعلاه مع تحسينات تشغيلية كبيرة تؤدي إلى آلة عالية الدقة وعالية الدقة. وتتوفر هذه المستشعرات في كيانين - أجهزة Gimbals (غالبًا ما يشار إليها باسم الحمولات أيضًا) وأنظمة الملاحة البصرية (VNS).
أجهزة التحكم عن بُعد* - توفر رؤية الشخص الأول (FPV)؛ وهي تشكل عمومًا أنواعًا مختلفة من مستشعرات الصور التي تمتد عبر الطيف الكهرومغناطيسي الواسع (الأشعة فوق البنفسجية في حالات استثنائية، ومستشعرات صور CMOS العادية التي تزيد عن 300 نانومتر - 1000 نانومتر، ومستشعرات الأشعة تحت الحمراء قصيرة الموجة (SWIR) التي تمتد إلى 2000 نانومتر وما بعد 2000 نانومتر مع مستشعرات الأشعة تحت الحمراء متوسطة الموجة (MWIR) وطويلة الموجة (LWIR).
أنظمة ملاحة الرؤية (VNS) - توفر التوجيه الملاحي وتجنب الأجسام والاصطدام؛ وهي تتكون بشكل عام من مستشعرات صور منخفضة الدقة وغير مكلفة وتستخدم مع وحدة القياس الدولي للملاحة الآلية وبيانات المستشعرات تقنيات الرؤية الحاسوبية لإنشاء حل شامل للملاحة الذاتية.
أهمية أنظمة الرؤية
تعمل الطائرات بدون طيار في كل من الظروف الداخلية والخارجية كما هو موضح في الاستخدام والتطبيقات الموضحة سابقاً. يمكن أن تكون هذه الظروف صعبة للغاية مع وجود اختلافات واسعة النطاق في الإضاءة وقيود الرؤية في الغبار والضباب والدخان والبيئات شديدة السواد. وتحاول هذه الأنظمة الاستفادة من خوارزميات الذكاء الاصطناعي (AI) وخوارزميات التعلم الآلي (ML) الكبيرة المطبقة على بيانات الصور مع استخدام مساعدة البيانات التي توفرها التقنيات المذكورة سابقاً، كل ذلك في سياق تشغيل مركبة مُحسّنة للغاية تستهلك طاقة منخفضة وتوفر عمليات بعيدة المدى أو عمليات طيران طويلة المدى أو وقت طيران ممتد.
من الضروري أن تكون البيانات التي يتم إدخالها في هذه الخوارزميات عالية الدقة والتفصيل، ولكن في بعض حالات الاستخدام، تقدم فقط ما هو مطلوب وبالتالي تمكين المعالجة الفعالة. يجب أن تكون أوقات التدريب في استخدام الذكاء الاصطناعي/التعلم الآلي قصيرة، ويجب أن يكون الاستدلال سريعاً بدقة ودقة عالية. يجب أن تكون الصور ذات جودة عالية بغض النظر عن البيئة التي تعمل فيها الطائرة بدون طيار لتلبية المتطلبات المذكورة أعلاه.
إن المستشعرات التي تلتقط المشهد فقط وتقدمه للمعالجة تقصر بشكل كبير في تمكين التشغيل عالي الجودة لهذه الآلات التي ستؤدي في معظم الحالات إلى إبطال الغرض من نشرها. إن القدرة على تصغير الحجم مع استمرار الحصول على تفاصيل كاملة في مناطق الاهتمام، وتوفير نطاق ديناميكي واسع لمعالجة ظروف الإضاءة الساطعة والمظلمة في نفس الإطار، وتقليل/إزالة أي تأثيرات طفيلية في الصور، ومعالجة حقول الرؤية المليئة بالغبار/الضباب/الدخان ومساعدة هذه الصور بدقة عالية في العمق توفر فوائد هائلة لجعل الطائرات بدون طيار آلة محسنة للغاية.
تقلل هذه الإمكانيات من حجم الموارد - أنوية المعالجة، ووحدات معالجة الرسومات، والذاكرة على الرقاقة أو خارجها، وبنية الناقل وإدارة الطاقة - المطلوبة في إعادة بناء وتحليل هذه الصور وتسريع عملية اتخاذ القرار. وهذا يقلل أيضاً من تكلفة BOM للنظام الكلي، خاصةً عندما نأخذ في الاعتبار أن الطائرات بدون طيار اليوم يمكنها بسهولة استضافة أكثر من 10 مستشعرات للصور. وبدلاً من ذلك، يمكن مقابل نفس المجموعة من الموارد، يمكن إجراء المزيد من التحليلات والخوارزميات المعقدة للمساعدة في اتخاذ القرارات الفعالة مما يجعل الطائرة بدون طيار متميزة في هذا المجال المزدحم.